Affordable vehicle positioning at lane level: Single-Frequency Precise Point Positioning with GNSS
To enable lane-level traffic control and management, the lane in which a vehicle is driving must be determined. Global Navigation Satellite Systems (GNSS), and in particular the American Global Positioning System (GPS), are widely used for vehicle navigation. However, the accuracy of stand-alone positioning with GPS lies in the order of 5-15 meter under favourable circumstances and is clearly not sufficient for lane level positioning.

Researcher

Supervisor

Update: Taking the Fast Lane – Workpackage C – Affordable vehicle positioning at lane level: SF-PPP-GNSS has been finished conform the project planning.
The latest results can be reviewed in our paper "Real-time multi-GNSS single-frequency precise point positioning" published in GPS Solutions, 2017. Partners interested in the developed SF-PPP software can contact Christian Tiberius (C.C.J.M.Tiberius@tudelft.nl).
After finishing his contract at the TU Delft, Peter de Bakker has accepted, per December 2017, a new job as a senior software engineer at TomTom in the localization group of the autonomous driving department.
Principal Investigator
PostDoc Researchers
PhD Researchers
Supervisors
Instrumented Vehicles
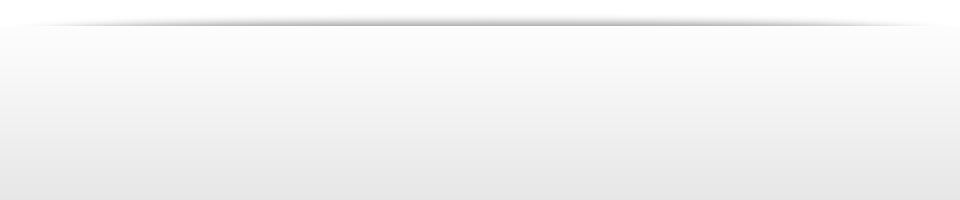
Figure 1: Our goal is to improve on the accuracy of stand-alone GPS, so that the lane in which a vehicle is driving, can be identified.
Precise Point Positioning (PPP) can improve this to sub- meter and even sub-decimetre accuracy without the need for additional local infrastructure. This is achieved by modelling and correcting for each of the error sources in GPS (Zumberge et al., 1997). One of the primary error sources in GPS is the ionosphere, which delays the ranging signals. The ionosphere delays can be estimated from dual-frequency data, but this requires expensive user equipment, and results in long convergence time to reach high positioning accuracy (De Bakker, 2016).
At Delft University of Technology, an alternative single-frequency approach was developed that uses (predicted) ionosphere maps and thus no longer relies on expensive dual-frequency user receivers, while still achieving a high positioning accuracy (Le and Tiberius, 2007). Additionally, since the ionosphere is no longer estimated from the observations, the position accuracy improves much faster than that of traditional dual frequency PPP, reaching 50cm accuracy already within a few epochs (e.g. seconds).
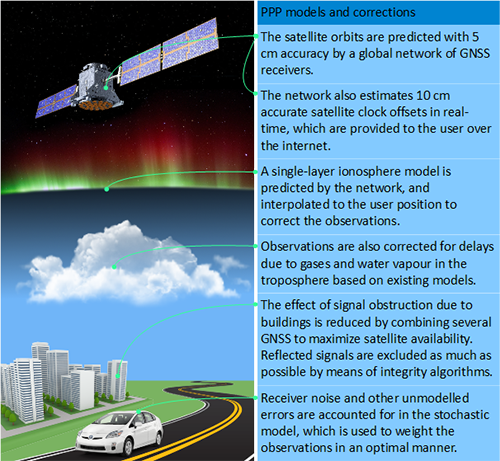
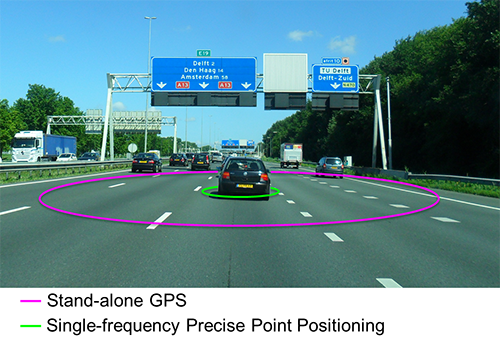
Figure 2: The SF-PPP algorithms uses a number of models and techniques to correct for the different sources of errors in GNSS.
Our SF-PPP algorithms were already successfully demonstrated on a motorway in an open environment (Van Bree et al., 2011). However, in order to have robust system with high availability in other areas, a number of research problems still need to be addressed.
Multi-GNSS multi-sensor integration
GPS performance strongly depends on the environment, and can degrade significantly when high-rise buildings limit sky visibility. Also, signals reflected of buildings and arriving at the receiver with an unknown additional delay (multipath) can decrease performance.
> Anticipating on low-cost automotive multi-GNSS chips in the years to come, additional GNSS (e.g. Russian GLONASS and European Galileo) are added to the algorithm. A multi-GNSS approach, will improve availability and redundancy of the combined system thereby maintaining performance with low sky visibility.
Figure 3: Adding GLONASS to our algorithms, increased the probability of correct lane identifying under impaired conditions. With GPS a maximum position error of 1.75 m is met in 87.5% of the cases (where 1.75 m is typically half of the lane-width on a motorway). When GLONASS is added this increases to 98.5% of the cases.
> Combining GNSS with a low-cost sensor on board the vehicle (e.g. measuring wheel revolutions, or turning rate) and using an integrated dynamic model for the vehicle can improve the performance when sky visibility is restricted and signals are temporarily interrupted.
Position Integrity
For GNSS applications the level of integrity quantifies the trust a user can place in the obtained position solution. Errors might not only occur in the measurements, but also in the augmentation data, that is in the external ionosphere and satellite information. Position integrity can be provided by applying the classical geodetic theory of integrity monitoring (an expertise of Delft University) to SF PPP for automotive applications. This theory relies on statistical tests that exploit the redundancy of the measurement model to Detect, Identify, and Adapt (DIA) errors in the measurements thereby creating a self-correcting and hence robust system.
References
de Bakker, P.F. (2016) On User Algorithms of Precise Point Positioning, PhD thesis Delft University of Technology.
van Bree, R.J.P., P.J. Buist, C.C.J.M. Tiberius, B. van Arem and V.L. Knoop (2011). Lane identification with real-time single frequency Precise Point Positioning: a kinematic trail. Proceedings of ION GNSS 2011. Portland, Oregon. September 19-23. pp. 314-323.
Le, A.Q. and C.C.J.M. Tiberius (2007). Single-frequency precise point positioning with optimal filtering. GPS Solutions. DOI:10.1007/s10291-006-0033-9. Vol. 11, No. 1. pp. 61-69.
Zumberge, J.F., Heflin, M.B., Jefferson, D.C., Watkins, M.M., and F.H. Webb (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res., 102, 5005-5017.